
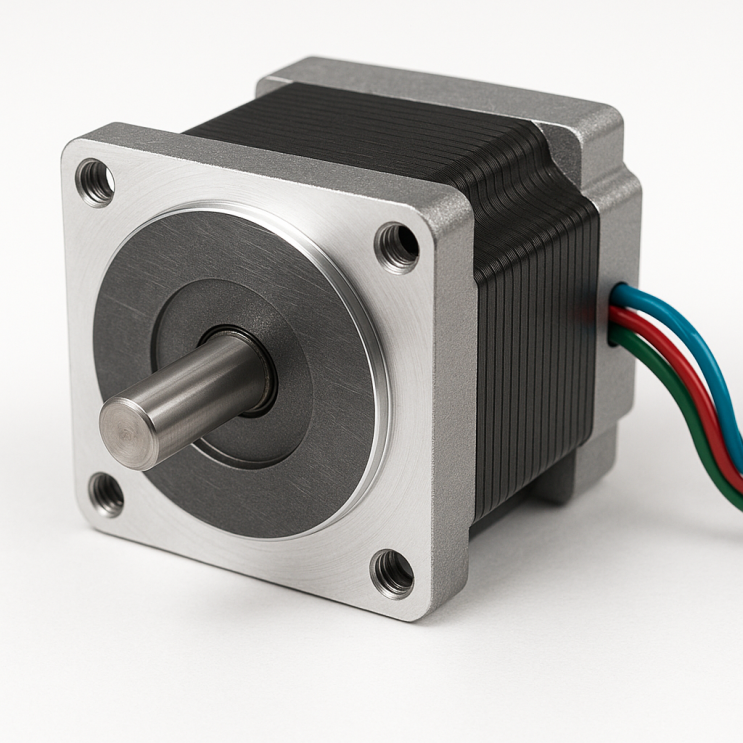
스테핑모터 원리 스테핑 모터는 내부에 여러 개의 자석(또는 코일)이 배치되어 있고, 순차적으로 전기를 흘려줌으로써 일정 각도로 회전(스텝) 합니다. 예를 들어, 1스텝에 1.8도를 회전하는 모터라면, 200스텝이면 360도를 한 바퀴 도는 셈입니다.
스테핑모터 장점 특징 설명 정밀한 위치 제어 피드백 없이도 위치 제어 가능 (오픈 루프 제어) 빠른 응답성 정지 상태에서 곧바로 회전 시작 가능 자기 유지 기능 전원이 인가된 상태에서는 고정된 위치를 유지 다양한 구동 방식 풀 스텝, 하프 스텝, 마이크로스텝 방식 등이 있음 스테핑모터 구동 방식 ① 풀 스텝(Pull Step) : 한 번에 한 스텝씩 이동. ② 하프 스텝(Half Step) : 코일을 번갈아 켜서 0.9도씩 이동(더 부드러움). ③ 마이크로스텝(Microstepping) : 전류를 정밀하게 제어해 더 세밀한 각도 제어 가능. 스테핑모터 단점 ① 고속에서 출력 감소 : 속도가 증가할수록 토크가 떨어짐 ② 진동과 소음 : 특...
원문 링크 : 스테핑모터 원리 속도 엔코더 결선 연결 서보모터와 차이

![[2025-12] 별거없슴체.](https://mblogthumb-phinf.pstatic.net/MjAyNTA1MDRfNDkg/MDAxNzQ2MjkzMzY0Njc4.DyAzndAM67eFg0qznIToIRgCsIo9OvhXrS8aXFDUoZog.oN40UuLJXLitHrWrD-_HQ6R92scpsKRRhlihWgPjAvcg.JPEG/KakaoTalk_20250504_022705749_19.jpg?type=w2)
![[2025-17] 놀고 먹고 열심히하기](https://mblogthumb-phinf.pstatic.net/MjAyNTA2MDhfMTEy/MDAxNzQ5MzkwMjQwMDUx.Si4nHsQZ01nhNd40QlKOxHNW4fjxWrhznlCOfF1-Meog._tPl0oSX8LsrxXDIX2cM2dEAqVyoaMg_-pdbu82FoI4g.JPEG/IMG_8040.jpg?type=w2)
