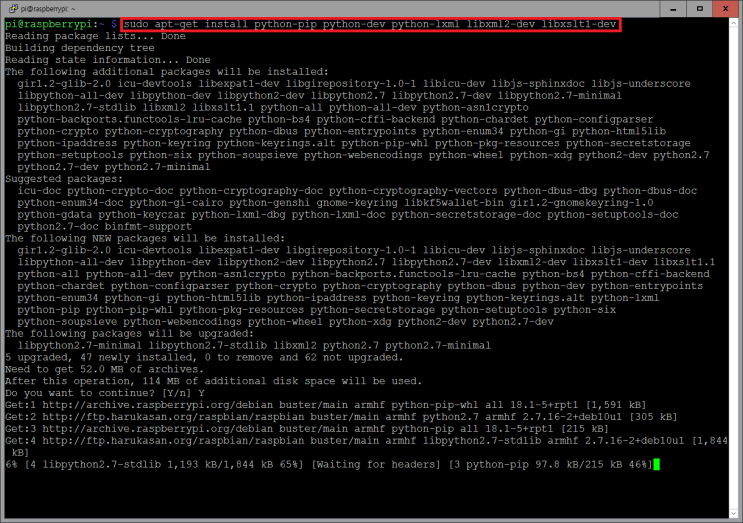
개발환경 구축환경이 완료되었으니 이제 Python 코드를 이용하여 pixhawk와 연결해볼 순서입니다. 다음과 같이 진행해 봅시다.
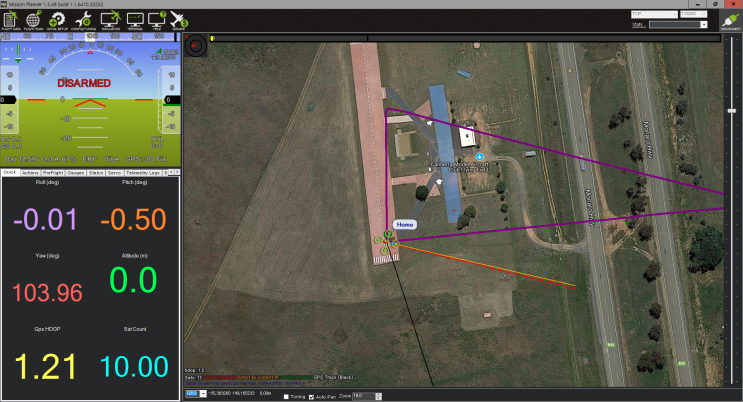
Pixhawk와 Companion PC와 연결 Pymavlink 라이브러리를 이용하여 Python code로 연결 소스코드 간략 설명 Mission Planner SITL 실행 1. Pixhawk와 Companion PC와 연결 가.
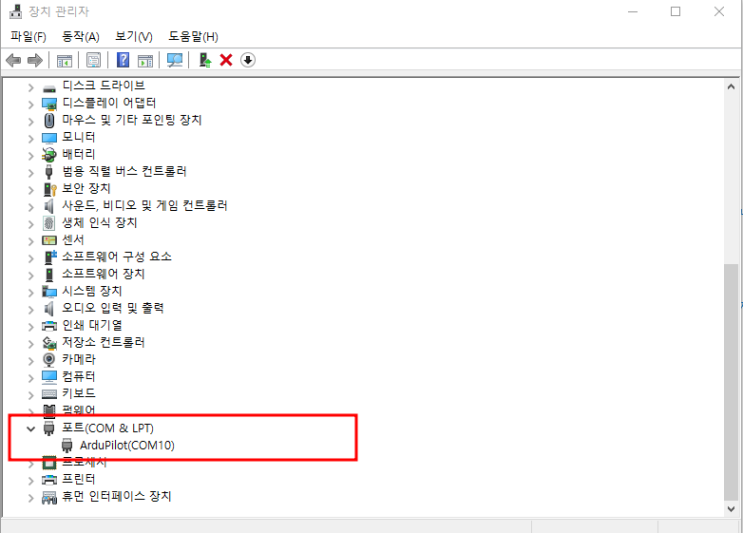
Windows 에서 USB 케이블로 연결하면, 장치관리자에서 COM 포트를 확인하실 수 있습니다. 나.
Raspberry pi나 데미안 리눅스 계열 PC와 Pixhawk를 USB cable을 이용하여 연결했다면 ls -al /dev/serial/by-id/* 명령어를 이용하여 ttyACM0 라는 포트명을 확인 하실 수 있습니다. 다.
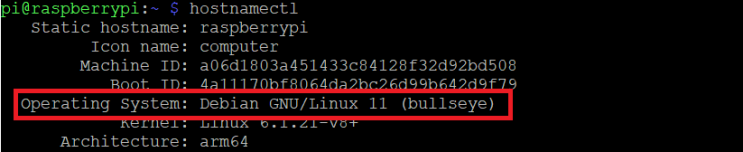
아래와 같이 Raspberry pi와 IO pin 으로 연결했다면 /dev/ttyS0 포트명으로 접속하실 수 있습니다. [ Raspberry PI3B , bookworm OS 에서 테스트 되었...
#
ardupilot
#
autopilot
#
Drone
#
mavlink
#
pixhawk
#
pymavlink
#
python
#
자율주행
원문 링크 : Pymavlink 와 pixhawk 연결