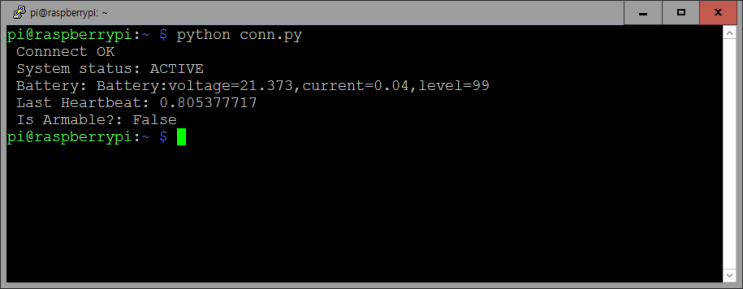
Pymavlink 라이브러리를 이용하여 Pixhawk와 연결 까지 성공했습니다. 이제 Pixhawk가 우리에게 보내는 메세지를 해석하고, 또 우리가 원하는 메세지를 보내는 과정에 대하여 알아봅시다. 1.
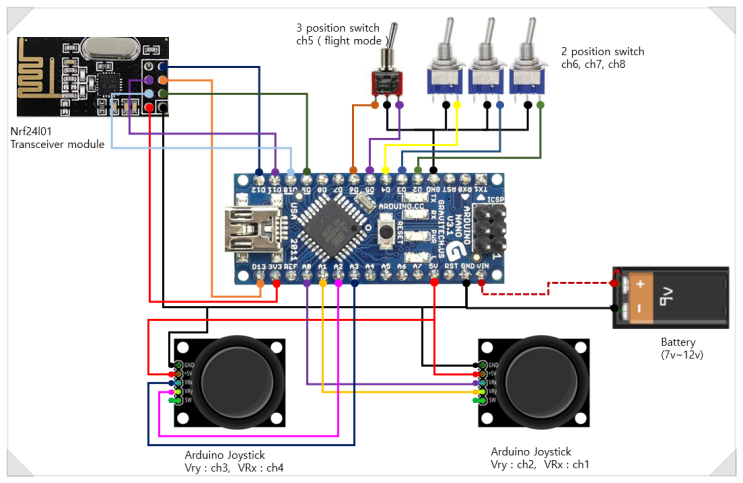
Pymavlink를 학습하기 위한 이론 가. Drone과 GCS( Ground Controll Station 지상기지국 , Mission Planner) 간의 통신 (1) System ID 와 Component ID 위 구성도와 같이 Drone과 GCS간 상호간 통신을 합니다.
먼저 알아야 할 것은 누가 Drone 이고 GCS인지 구분 부터 확실히 해야겠지요, 이 때 사용하는 항목이 System ID와 Component ID입니다. 법칙 규정은 아니지만, System ID 가 255, Component ID 가 1인것을 GCS, System ID 가 1 Component ID 가 1인것을 Drone 이라 간주합니다.
그러면 GCS 1개에, Drone이 2대이라면 첫번째 드론은 Sys...
#
ardupilot
#
autopilot
#
Drone
#
mavlink
#
pixhawk
#
pymavlink
#
python
#
자율주행
원문 링크 : Pymavlink 통신의 이해