1. Set Flight Mode 2.
Arm/Disarm 3. Take Off 4.
Manual Controll 5. Set attitude 6. channel_override 7.
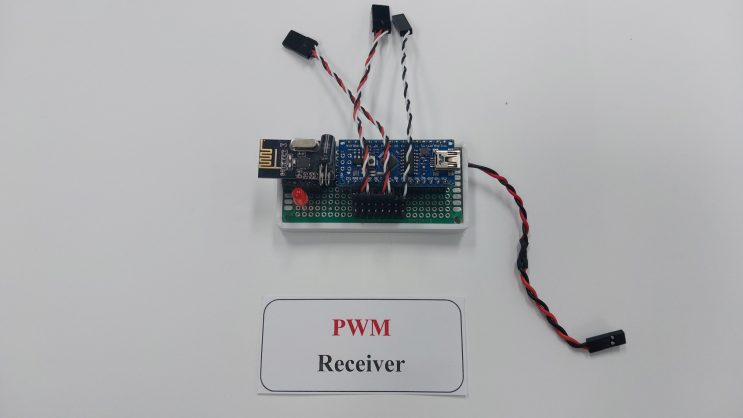
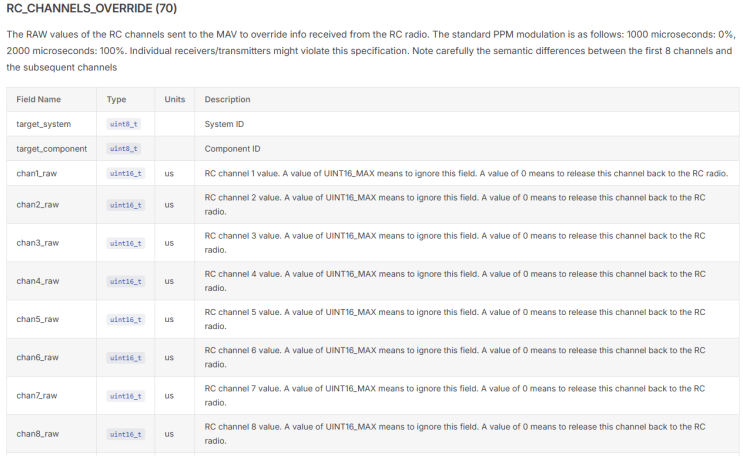
Land / RTL 1.Channel_override pymavlink 를 이용한 명령실행 5번째 시간입니다. channel_override 명령은 가상의 조종기 신호를 python 코드로 Drone에게 송신하는 기능입니다. 가.
RC_CHANNELS_OVERRIDE (70) 메세지 설명 Mavlink V1에서는 8채널, Mavlink V2에서는 16채널 까지 사용이 가능합니다. 이 기능을 사용하기 전에 사전에 반드시 해야하는 사항은 각 채널의 MIN, MAX 값을 알아야합니다.
CH3(Throttle) 신호를 min 보다 작은값으로 송신할 경우 Fail Safe 기능이 동작합니다. 그러므로 Read All Parameters 또는 Read Single Parameters 명령을 수행하여 각 채널의 m...
#
ardupilot
#
autipilot
#
drone
#
mavlink
#
pixhawk
#
pymavlink
#
python
#
자율주행