지난번 강좌에서 이론 강의를 충실히 학습하셨다면 , 이제 예제로 확인하실 차례입니다. 이번 예제는 다소 어렵고 내용도 깁니다.
정신을 집중하고 이해가 안가실 경우 여러번 정독바랍니다. 본 예제에서는 기체의 비행모드가 GUIDED 모드상태에서 기체 이동제어 및 명령을 보내는 방법을 보여줍니다.
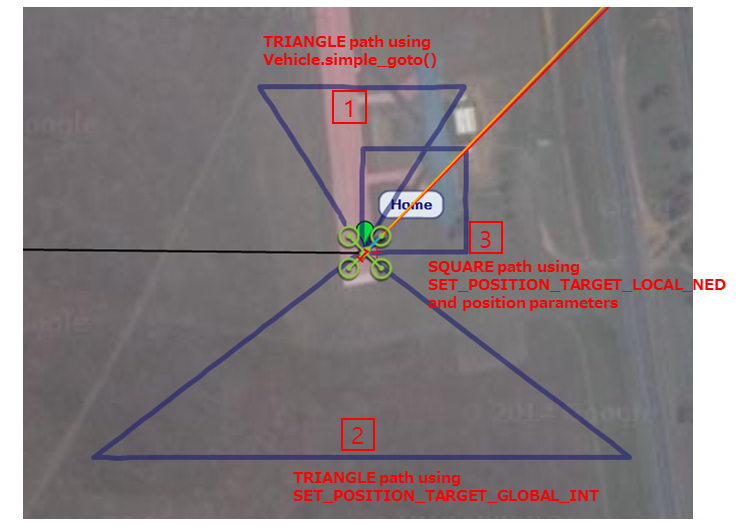
또한 위치기반 이동방법의 세 가지 방법과, 속도 벡터를 설정하여 이동을 제어하는 두 가지 명령을 보여줍니다. 그리고 YAW(기체헤딩방향), 관심영역, 속도 및 홈 위치를 제어하는 방법을 확인 하실 수 있습니다.
이번 강의를 숙지하신다면 PC에서 pixhawk 드론 위치제어의 거의 모든 사항을 습득 하신것이나 다름없습니다. 아래 링크에서 예제를 다운받아 실행해 보시기 바랍니다.
첨부파일 guided_set_speed_yaw.zip 파일 다운로드 1. 예제실행 가.
SITL 실행 : 도스창에서 옵션없이 dronekit-sitl copter 명령으로 실행.(홈위치는 호주 어느곳. . .)
나. Mis...
#
drone
#
dronekit
#
goto
#
pixhawk