1. 서론 PID(Proportional-Integral-Derivative) 제어는 오늘날 제어 및 자동화 어플리케이션의 90% 이상을 차지하는데, 이는 주로 구현하기에 효과적이고 간단한 솔루션이기 때문입니다.
원래는 선형 시불변 시스템을 위한 것이었지만 PID 알고리즘이 발전하여 엔지니어가 복잡한 동역학을 가진 시스템도 제어할 수 있게 되었습니다. 모든 시스템에는 PID와 같은 고전적인 피드백 제어를 사용할 때 문제가 되는 비선형 구성 요소가 있습니다.
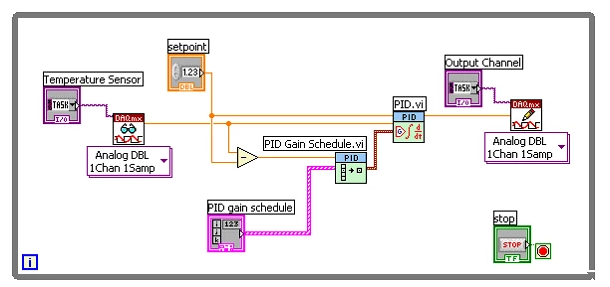
게인 스케줄링 및 캐스케이드 PID와 같은 몇 가지 소프트웨어 기술의 도움으로 이제 동일한 PID 알고리즘을 사용하여 비선형 시스템도 제어할 수 있습니다. PID 변수값에 따른 PID 제어 예시 그래프 2.
랩뷰의 PID 제어 1) 클래식 컨트롤 피드백 제어는 고대부터 기계 시스템 제어에 사용되어 왔습니다. 원래 이러한 시스템은 온도, 속도 및 유체 레벨을 제어하기 위해 플로트 밸브와 같은 기계적 수단을 사용했습니다.
최신 컴퓨터...
원문 링크 : 랩뷰에서 PID제어 프로그래밍하는 방법