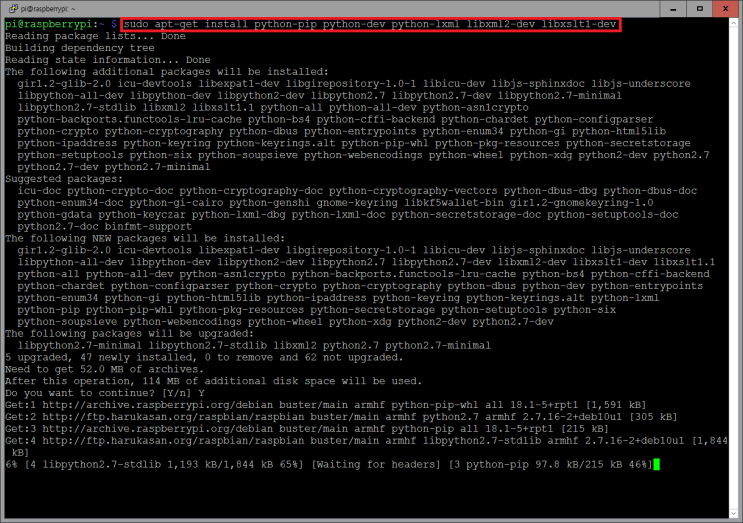
이번 강좌에서는 GCS가 Drone에게 Message를 요청하는 방법입니다. 일전에 Python 코드로 Drone에 접속해 봤습니다.
Pymavlink로 Drone을 연결하면 즉시 자동으로 Drone이 GCS한데 메세지를 막보내고 GCS는 수신하면 될까요 ?? 답은 아니요 그렇치 않습니다. 1.
SRx_ prameter 설정 2. REQUEST_DATA_STREAM (66) — [DEP] 3.
MAV_CMD_SET_MESSAGE_INTERVAL (511) 4. MAV_CMD_REQUEST_MESSAGE (512) 1.
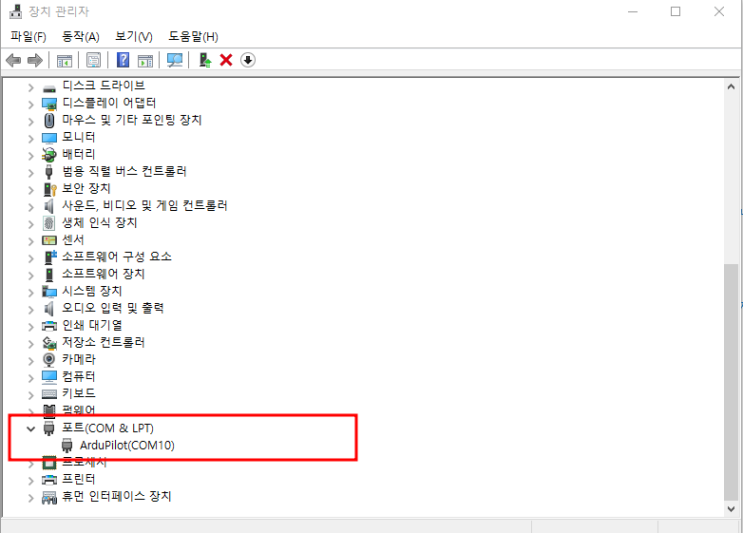
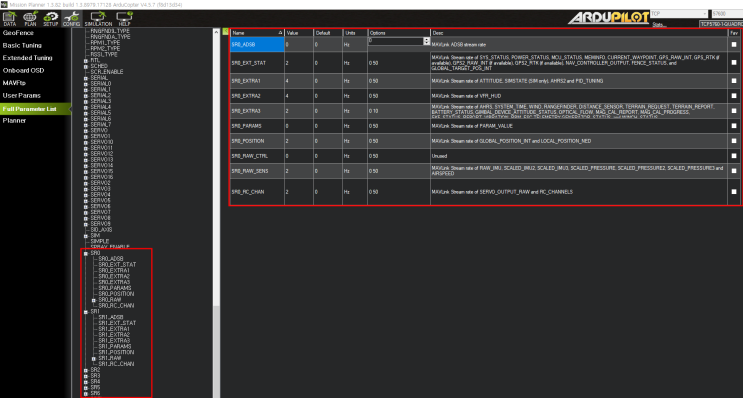
SRx prameter 설정 가. Pixhawk의 Serial 포트 parameter 설정 값을 변경하여, GCS가 Pixhawk에 접속하면 자동 으로, Message를 GCS에게 보내도록 설정 장점은 당연히 쉽고 간편하지만, 단점도 있지요 Pixhawk 연결을 Serial0에 했는지 Serial1에 했는지에 따라 어떤 메세지는 수신되고, 안되고 차이뿐만 아니라 메세지...
#
ardupilot
#
autopilot
#
Drone
#
mavlink
#
pixhawk
#
pymavlink
#
python
#
자율주행