지난시간에 이어 계속해서 메세지를 학습해봅시다. 1. HEARTBEAT (0) 2.
STATUSTEXT (253) 3. ATTITUDE (30) 4.
VFR_HUD (74) 5. GLOBAL_POSITION_INT (33) 6.
BATTERY_STATUS (147) 7. GPS_RAW_INT (24) 2.
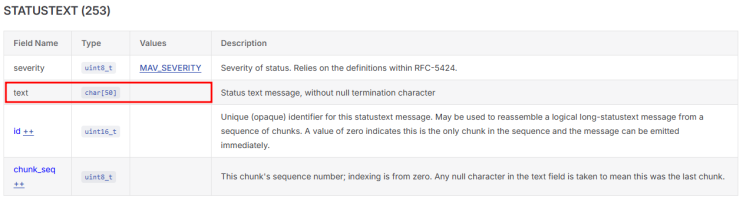
STATUSTEXT(253) Mission Planner 에서 가장 많이 보신 메세지입니다. Pixhawk Drone arming 실패 시 Compasses inconsistent, Pre-Arm Safety Checks, Throttle below failsafe 이런 메세지를 MissionPlanner에서 확인 종종 확인하셨을 것입니다.
이런 사용자 안내문구를 알려주는 MavLink 메세지가 STATUSTEXT(253) 입니다. from pymavlink import mavutil vehicle = mavutil.mavlink_connection('tcp:127.0.0.1:57...
#
ardupilot
#
autopilot
#
Drone
#
mavlink
#
pixhawk
#
pymavlink
#
python
#
자율주행
원문 링크 : Pymavlink read drone message (2)