자 이제 중요하고 기본적인 mavlink message 를 수신하고 중요한 항목을 분석해봤습니다. 그런데 Drone을 제어하기 위해 마지막으로 알아야할 한가지가 더 있습니다. pixhawk drone의 parameter 값 Get / Set 입니다.
우리가 흔의 말하는 백홈, RTL( Return to Launch ) 기능을 사용하려할 때, 내 Drone이 얼만큼 고도를 상승 후, 복귀를 하지 ? 배터리가 몇 volt 일때 자동 복귀하지 ?
이런 사전에 정의된 동작을 Drone이 수행하게될 때 혹은 기체에 설정된 값을 프로그래밍으로 확인해 볼 필요가 있습니다. 1. Read All Parameters 가.
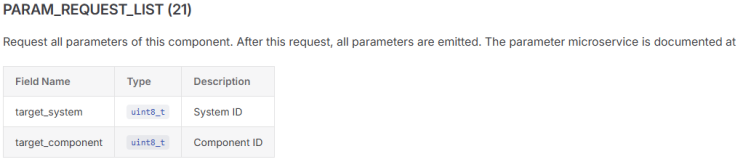
GCS --> Drone 요청 [ PARAM_REQUEST_LIST (21) 메세지 송신 ] GCS가 Drone에게 모든 파라메터 정보를 달라고 메세지를 송신합니다. 이때 사용하는 메세지가 PARAM_REQUEST_LIST 입니다.
나. Drone --> GCS 응답 [ PARAM...
#
ardupilot
#
autopilot
#
Drone
#
mavlink
#
pixhawk
#
pymavlink
#
python
#
자율주행
원문 링크 : Pymavlink parameter get set