지난 시간에 이어 Pymavlink 로 Drone을 제어하는 명령을 실행해 봅시다. 이 예제코드는 학습을 위한 코드이므로 실전에서 사용시 많은 예외사항 코드 처리 후 사용 하셔야 합니다.
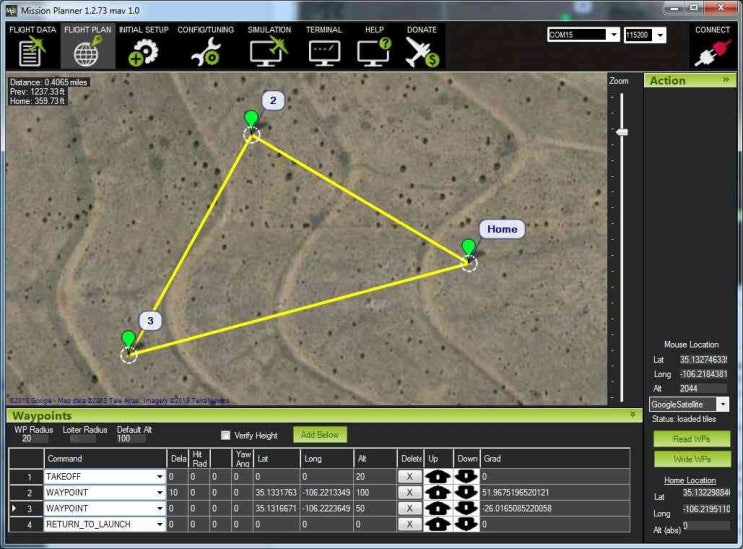
또한 안정화 되었다 판단되기 전까지 실제 드론에 꼭 줄을 묶어 테스트 하시기 바랍니다. 그리고 학습시에는 MIssion planner의 SITL 가상드론으로 합니다.
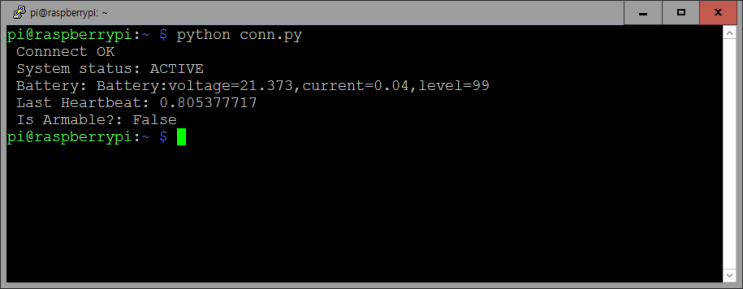
이렇게 하면 코드로 실행한 사항을 Mission Planner 에서 실시간 모니터링이 가능합니다. 1. Set Flight Mode 2.
Arm/Disarm 3. Take Off 4.
Manual Controll 5. Set attitude 6. channel_override 7.
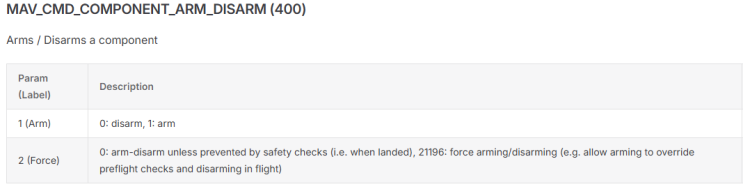
Land / RTL 1. SET FLIGHT MODE 가.
MAV_CMD_DO_SET_MODE Command 설명 비행모드를 설정하는 명령어 입니다. 우리는 Drone의 자율주행을 위해서 기본적으로 GUIDED, 또는 AUTO 모드를 사용해야 하므로 가장 기...
#
ardupilot
#
autopilot
#
Drone
#
mavlink
#
pixhawk
#
pymavlink
#
python
#
자율주행