pymavlink 를 이용한 명령실행 3번째 시간이 되었네요 , 계속해봅시다. 1. Set Flight Mode 2.
Arm/Disarm 3. Take Off 4.
Manual Controll 5. Set attitude 6. channel_override 7.
Land / RTL 1. Manual Controll 가.
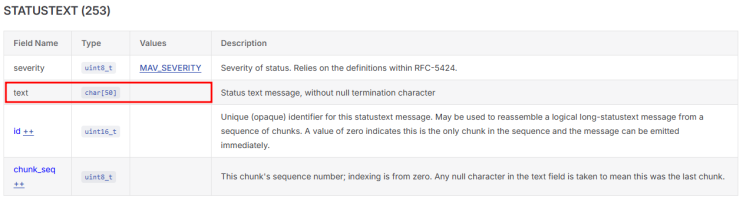
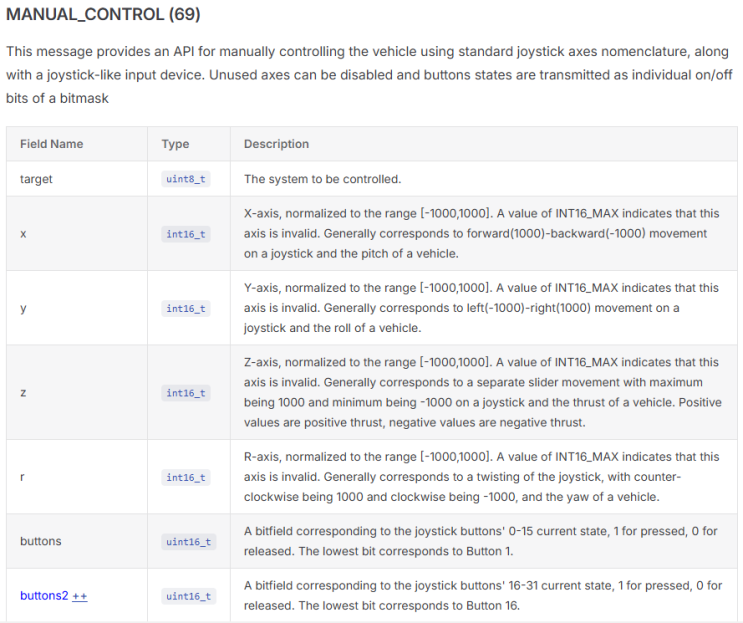
MANUAL_CONTROL (69) 메세지 설명 Drone을 python 코드로 수동으로 제어하는 메세지 입니다. 좀 특수한 메세지 라고 볼 수 있습니다.
자 문서를 봅시다. Joystick 또는 Game pad 와 같은 외부 입력 장치의 신호를 읽어서 Drone으로 전송하여 기체를 제어하기위한 기능이라고 보시면 됩니다.
그러면 먼저 외부입력장치 즉 조이스틱의 신호를 python code로 읽어야 하겠지요. 필자의 경우는 pygame python 라이브러리를 활용하여 조이스틱 제어를 한적이 있습니다.
혹시 필요하신분은 아래 블로그 글 찾아가셔서 확인해보시기 바랍니다....
#
ardupilot
#
autopilot
#
Drone
#
mavlink
#
pixhawk
#
pymavlink
#
python
#
자율주행