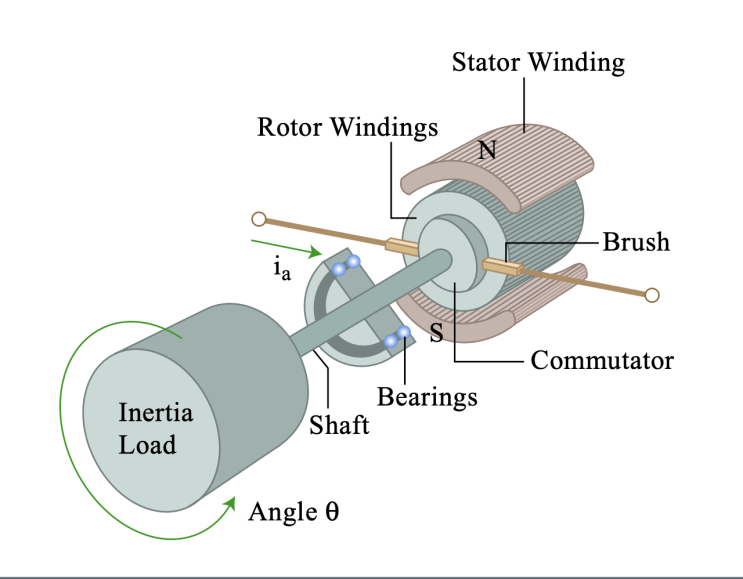
본 포스트는 2005 MIT Harry Asada 의 Introduction to robotics에 기반합니다. 토크는 K (Torque constant) 와 전류의 곱과 같다.
토크 상수의 경우 자기장의 세기에 의해 정의 되며, 이는 winding 감기의 횟수, air gap의 효율적인 공간, rotor의 지름이 연관이 되어있다. E 는 idealized tranducer에 반영된 전압이다.
이때 전력(electric power)는 E i 이며 이는 곧 기계적인 힘으로 바뀐다. 토크와 각속도가 곧 전렧이 되는 것이다.
이때 앞서 언급한 토크 공식을 적용하면 위 수식이 나태내는 것은 (이상적인) 트랜스듀서의 전압은 각속도와 토크상수에 비례함을 알 수 있다. 이 전압 E를 back emf (Electro-motive force)라 하는데 이때 정비례적으로 생기는 상수 역시 이를 따 back emf 상수라 부른다.
The above expression dictates that the v...
원문 링크 : Actuators and Drive System(1)

![[3D printer] Ender Heating Failed 이슈 - 서미스터와 히팅 튜브 (Thermister & heating tube)](https://mblogthumb-phinf.pstatic.net/MjAyMTA2MTFfNzEg/MDAxNjIzMzg4ODYyMjcx.aqw0G8L9Tm9yqJ_kUucK6gZN5j3NSO9efk-GNGV0njMg.UGIMmIuxDTfg9VZRsrs2qbwcOWNMjGllW1wEjGMKCwMg.PNG.jga503/%BD%BA%C5%A9%B8%B0%BC%A6_2021-06-11_%BF%C0%C8%C4_2.20.54.png?type=w2)

![[2023.10] 남해](https://mblogthumb-phinf.pstatic.net/MjAyMzEwMjFfMjA0/MDAxNjk3ODIxMzQ3OTUz._tG5BvyUgDc9ZdrOfeoiwOugUnbmoo1ZSGUjet1wxRIg.vkjd8Xz72jEv0Wv2GqWqvTxyJOSczzX5IcBOzFjo768g.JPEG.jga503/IMG_2253.jpg?type=w2)