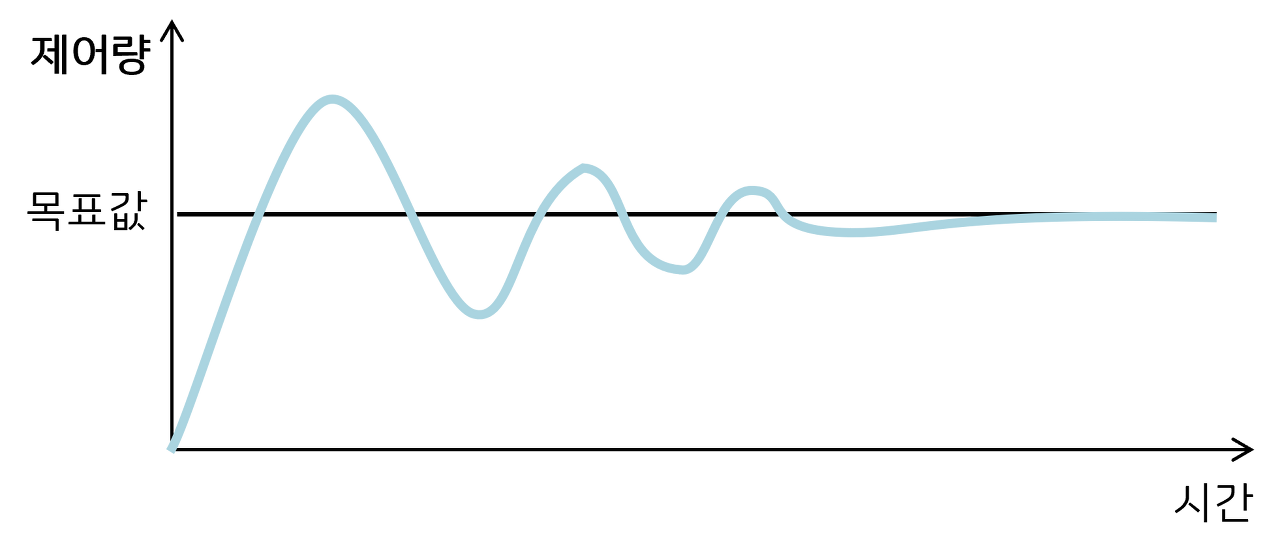
PID(P-Proportional, I-Integral, D-Derivative) 컨트롤러 게인 값 튜닝은 제어 시스템에서 중요한 작업입니다. 올바른 게인 값 설정은 시스템의 안정성, 반응 속도 및 오버슈팅 등을 조절하는 데 도움이 됩니다.
다음은 일반적으로 사용되는 몇 가지 PID 게인 값 튜닝 방법입니다. 1. 수동 튜닝 - Proportional Gain (P)를 먼저 증가시키고 시스템의 반응을 관찰합니다.
반응이 느리면 P 값을 증가시키고, 반응이 불안정하거나 오버슈팅이 발생하면 P 값을 감소시킵니다. - Integral Gain (I)를 조정하여 시스템의 정확도와 오차 보상을 개선합니다. I 값을 증가시켜 오차를 줄이거나, I 값을 감소시켜 오버슈팅을 완화할 수 있습니다. - Derivative.....
원문 링크 : PID 게인 값 튜닝 방법