(1) 셀 온라인 적재: 로봇이 셀을 자재 상자에 넣고 AGV 트롤리가 현장 적재를 위해 적재 위치로 끌어옵니다. 각 자재 상자의 위치는 자동으로 감지됩니다.
자재가 부족하면 감지 기능이 안전 시스템과 MES(생산 정보 관리 시스템)를 통해 조기 경고를 표시합니다. (2) 배터리 셀 OCV/ACR 테스트: 로봇은 재료 상자에서 배터리 셀을 잡아 아래로 실행하여 코드 스캔, 배터리 셀 극성 확인, OCV 테스트 및 K 값 비교 기능을 자동으로 실현합니다. 또한 이 프로세스에는 배터리 극성 실수 방지 감지 기능과 배터리 이중 코드 실수 방지 기능이 있습니다.
따라서 이상이 있으면 경보가 울리고 셀을 NG 스테이션에 배치합니다. (3) 셀 플리핑/셀 세척: 로봇은 모듈에 필요한 극성의 셀을 배열하고 셀을 뒤집습니다. 모듈의 배터리 셀의 극성에 따라 로봇은 위치에 따라 배치되고 배터리 셀을 접착하고 절연 커버와 방열판을 붙이고 동시에 여러 배터리 셀을 뒤집을 수 있습니다.
플라즈마 클리너는...
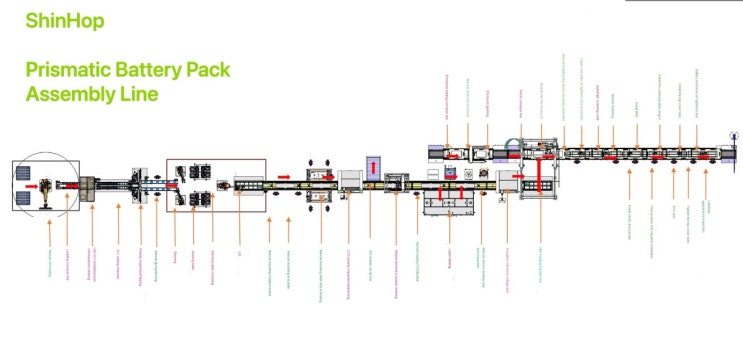
원문 링크 : 각형 배터리 조립라인 구성