
지난 시간에 우리는 Service에 대한 총정리를 해 보았습니다. https://blog.naver.com/dorergiverny/223771083716 [SLAM] ROS2 Service 총정리 service type list find interface show service call ROS 단위 rad spawn reset 지난 시간에 우리는 Node와 Topic에 대해 정리해보았습니다. https://blog.naver.com/dorergiverny/22377... blog.naver.com ROS에서 통신 방법에는 Topic, Service, Action과 같이 실시간성으로 통신하는 방법과 파라미터와 같이 비실시간성으로 통신하는 방법이 있습니다. 그 중에서 이번에는 Action에 대해 알아보겠습니다.
Action Topic과 Service는 호흡이 짧은 상황에서의 통신 방법이라면 Action은 호흡이 긴 상황에서의 통신방법이라고 할 수 있습니다. 예를 들면 공항 로봇에게 xx...
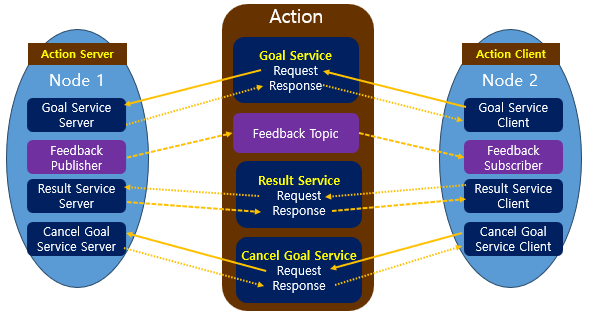
원문 링크 : ROS2 강의(13) Action 총정리 Topic Service Action Parameter Goal Feedback Result interface show send_goal
![[OpenCV][C++] 템플릿 매칭 (template matching) 총정리(1) - matchTemplate minMaxLoc SQDIFF CCORR CCOEFF](https://mblogthumb-phinf.pstatic.net/MjAyMzA1MjFfMTMx/MDAxNjg0Njc5NzMxOTk5.9xJ9NEiYipQLJf5tXVeLfbV_fvhUNMO_wxl8RQYDqqkg.vk7AuwaOpqnuuumpLVuawtTuQzfzhuNOil_xgFRioUgg.PNG.ljk3815/image.png?type=w2)
![[OpenCV][파이썬] VSCode 설치 및 anaconda 연동하기 - Visual Studio Code 세팅 IDE 아나콘다 python 최신버전 환경설정 버전확인](https://mblogthumb-phinf.pstatic.net/MjAyMzA3MjlfMTEx/MDAxNjkwNTkxMzgwMzU3.RaUppuA6Zdk5tfEjTuK3_mZs4y9aJUVuYDUubG22FM8g.PdyfC4rbXGUoUSY16qIpGS_4D3Xez2CvQ0fPWFX_wBgg.PNG.ljk3815/image.png?type=w2)
![[Python][Project] 압축 파일 암호 푸는 프로그램 - 알집 반디집 unlocking dirname zipfile itertools product extractall](https://mblogthumb-phinf.pstatic.net/MjAyMzA4MDlfNzYg/MDAxNjkxNTg1MTA5MzMz.79ByO4aCy28mZLctpI21a6KkSqLMoAAYq-PLGoDykt8g.aExINaJMG9QaR6347MPKPIdkCNMtIefurTOGl678Gy8g.PNG.ljk3815/image.png?type=w2)
![[데이터 분석] ADsP 일주일 만에 합격하기 8편 - 통계 계통 층화 추출 명목 순서 구간 척도 베르누이 포아송 카이제곱 분포 F분포 표준 정규 분포 통계량 표본 조건부 확률](https://mblogthumb-phinf.pstatic.net/MjAyMzEwMjNfMTUw/MDAxNjk4MDYxNDg3MTUw.sbRnGoJlmrZKj99f_fPnDbl4FFvoTM7a61Km29hIVG4g.WdDRyM3i7z5rp-6GKm4H41CspuezJN9f6LDPYY0WC8cg.PNG.ljk3815/image.png?type=w2)
![[데이터 분석] ADsP 일주일 만에 합격하기 11편 - 회귀분석 최소제곱 릿지 라쏘 Ridge Lasso SSR SSE SST 다중공선성 전진선택 후진제거 분산팽창계수 VIF](https://mblogthumb-phinf.pstatic.net/MjAyMzEwMjhfOTUg/MDAxNjk4NTAxNDIxMTY0.RG1fdcXgNrWPqrLbRCbO-m0I2qm54ZaPaV5s-QkP-6Ig.bJPMTX4GxKmLVcR5jIp9enstiJWIdnS8srz5igJdwX8g.PNG.ljk3815/image.png?type=w2)
![[데이터 분석] ADsP 일주일 만에 합격하기 16편 - 군집분석 마할라노비스 밀도기반 클러스터링 DBSCAN 유사도 실루엣 계수 자기조직화지도 SOM 지지도 신뢰도 향상도 연관](https://mblogthumb-phinf.pstatic.net/MjAyMzExMDNfMjcg/MDAxNjk5MDEzMDQ3MTQw.DR-zIlWTvkbDf_Qjgmhfdbkz-lj0J1oCuWLGzhG7--0g.ztaaFGIRHiYNVTZrik-1eVyMsRLTWCDgLGt_rtu4_XIg.PNG.ljk3815/image.png?type=w2)