글 알림 표 대상: 일반, 개발자, 엔지니어 필요 사전 지식: 물체고정좌표계, 관성좌표계, 행렬 난이도: 중 지난 포스팅에서 3차원 공간을 구성하는 좌표계와 좌표변환에 대해서 알아보았습니다. (관성좌표계와 물체고정좌표계: https://blog.naver.com/droneaje/221996242839) 이 번 포스팅은 좌표변환의 연장선에서, 물체에 고정된 좌표계(Body-fixed coordinate system)의 각 축을 기준으로 회전하는 3가지 오일러 각(Euler Angles)을 드론/항공기의 회전에 적용하여 알아보겠습니다. :) 먼저, 여기서 대상으로 하는 물체는 강체(Rigid Body)인데요.
말 그대로, 딱딱한 물체라는 뜻인데요. 물체가 구부러지지 않고, 외형의 변화 없이 유지하는 것을 지칭합니다.
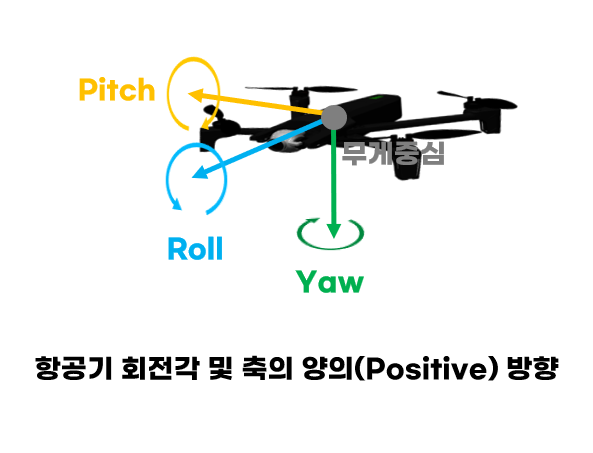
반대 개념으로는 탄성체(Elastic Body)가 있으나, 여기서는 다루지 않겠습니다. 다시 한번 항공 우주분야에서 사용하는 축의 방향부터 정리해 보겠습니다. < 항공기 회...
#
123eulerangle
#
강체
#
오른손법칙
#
오일러
#
오일러각
#
오일러각정리
#
오일러각정의
#
오일러각회전
#
오일러앵글
#
오일러정의
#
오일러회전
#
좌표계
#
좌표변환
#
좌표변환공식
#
rigidbody
#
righthandedrule
#
123오일러각
#
123오일러회전
#
321eulerangle
#
321오일러각
#
321오일러회전
#
coordinates
#
coordinatetransformation
#
Euler
#
EulerAngle
#
EulerAngleRotation
#
EulerAngles
#
EulerRotation
#
frame
#
좌표체계