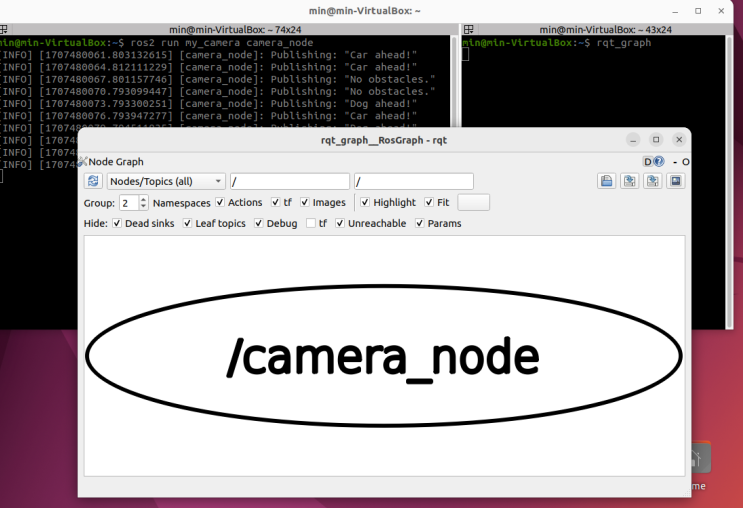
이전 글에 이어서 diy_camera.py 를 작성해보도록 하겠습니다. 이번 글에서는 Publisher을 담는 파이썬 Node를 작성해보겠습니다!
우선 이에 앞서 가장 기본적인 파이썬 코드를 써보았습니다. import time import random messages = ["No obstacles.
", "Car ahead!", "Dog ahead!"]
while True: print(random.choice(messages)) time.sleep(3) 아주 기본적인 파이썬 프로그램을 입니다! 3초마다 No obstacles.
/Car ahead!/Dog ahead!
셋 중 하나를 랜덤으로 출력하는 파이썬 프로그램입니다. 이 프로그램을 ROS2 노드로 만들어보도록 하죠!
#!/usr/bin/env python3 import rclpy from rclpy.node import class MyCustomNode(Node): # MODIFY NAME def __init__(self): sup...
#
Gazebo
#
Moveit
#
ROS2
#
URDF
#
로봇팔