지난 시간 우리는 GCS가 Pixhawk Drone에게 메세지를 요청하는 방식을 학습 했습니다. 그러면 어떠한 메세지를 우리가 확인해야 할까요 ?
전부다 ?? 그러면 너무 많치요 , 비행 및 기체상태 정보과 관련된 메세지가 우리의 주요한 관심사 이겠지요 .
이제 중요한 Ardupilot 메세지를 확인해 봅시다. 1. HEARTBEAT (0) 2.
STATUSTEXT (253) 3. ATTITUDE (30) 4.
VFR_HUD (74) 5. GLOBAL_POSITION_INT (33) 6.
BATTERY_STATUS (147) 7. GPS_RAW_INT (24) 1.
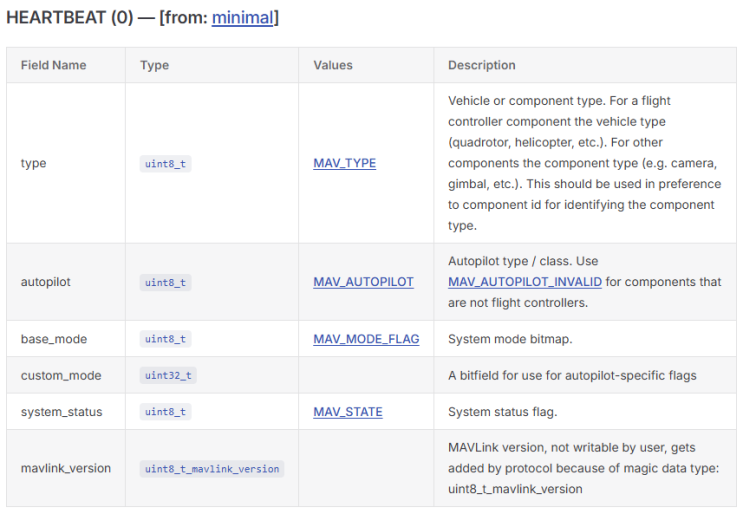
HEARTBEAT(0) 가. 기본 메세지이며, GCS가 요청하지 않아도 무조건 수신되는 메세지 입니다.
HEARTBEAT {type: 2, autopilot: 3, base_mode: 81, custom_mode: 0, system_status: 3, mavlink_version: 3} 위의 HEARTBEAT 메세지를 분...
#
ardupilot
#
autopilot
#
Drone
#
mavlink
#
pixhawk
#
pymavlink
#
python
#
자율주행
원문 링크 : Pymavlink read drone message (1)