본격적으로 Python 코드를 이용하여 Drone을 제어하기 위한 command 에 대하여 다루어 볼겁니다. GCS와 Done 은 상호간 메세지로 통신합니다.
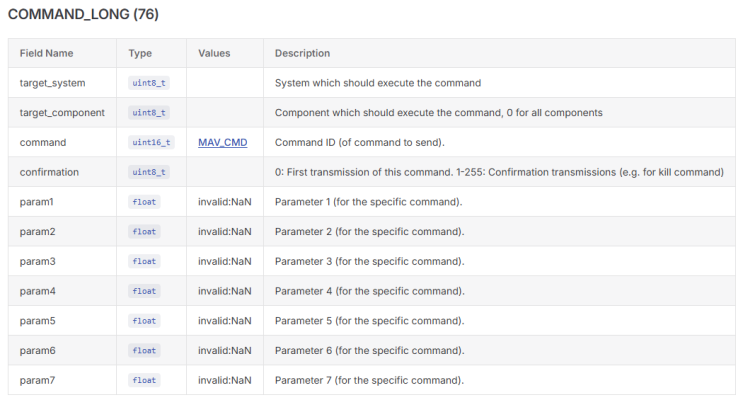
그러므로 우리는 명령을 보내기 위해 사용되는 메세지를 확인 해야합니다. 명령에 사용되는 메세지 Commands (MAV_CMD) Commands 실행절차 1.
명령에 사용되는 메세지 가. SET_XXXX 관련 메세지 접두어 SET_ XXXX로시작되는 메세지는 GCS가 Drone에게 특정 행위를 하도록 하는 메세지입니다.
대표적으로 Drone의 자세를 수동으로 제어하는 SET_ATTITUDE_TARGET , 특정한 위치로 Drone을 이동시키는 SET_POSITION_TARGET_LOCAL_NED, SET_POSITION_TARGET_GLOBAL_INT 메세지가 대표적입니다. 아래는 SET_POSITION_TARGET_GLOBAL_INT 사용 예시입니다.
이 메세지는 규칙이 없으므로 각 메세지 사용법은 문서를 참조해서 사용해야 ...
#
ardupilot
#
autopilot
#
Drone
#
mavlink
#
pixhawk
#
pymavlink
#
python
#
자율주행
원문 링크 : Pymavlink command execution (1)