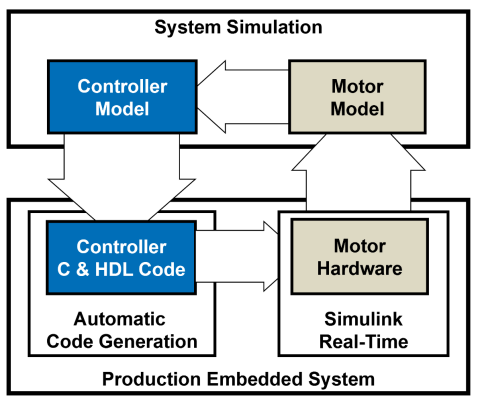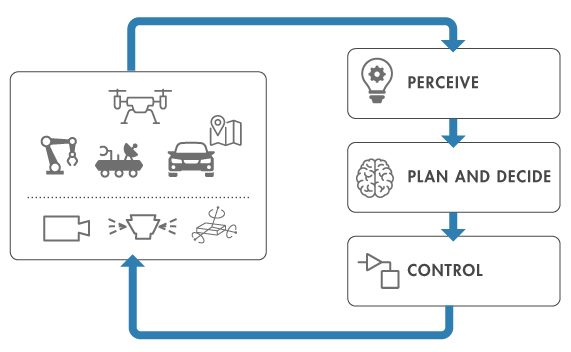
로봇 프로그래밍에서는 로봇이 환경을 인식하고 계획을 세우며 의사결정을 하고 작업을 수행할 수 있도록 하는 컴퓨터 프로그램을 작성합니다. 예를 들면 건물 안을 자율적으로 탐색하는 지상 로봇을 프로그래밍하려면 감지와 인지, 위치추정 및 지도작성, 경로 계획, 경로 추종, 액추에이터 제어, 및 기타 작업이 요구됩니다.
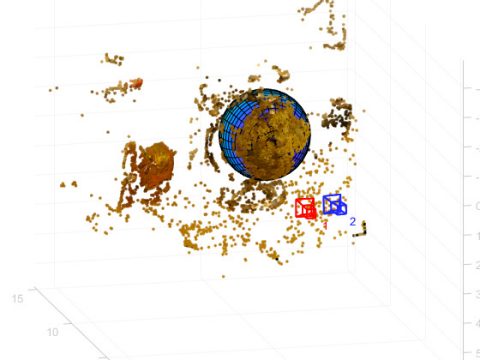
로봇 프로그래밍에는 일반적으로 다음과 같은 작업이 수반됩니다. 로봇이 환경을 인식하도록 객체 검출, 분류, 추적, 모션 추정 등에 컴퓨터 비전 및 딥러닝 알고리즘 사용 SLAM(Simultaneous Localization and Mapping), 충돌 회피, 모션 계획을 위한 알고리즘을 통한 로봇 자율성 구현 모델 예측 제어, 계산..........
MATLAB 및 Simulink에서 로봇 프로그래밍하기에 대한 요약내용입니다.
자세한 내용은 아래에 원문링크를 확인해주시기 바랍니다.