학교에서 NJPLC를 이용하여 서보모터를 사용해 보았다. 동작 동영상은 https://www.youtube.com/watch?
v=yG7uETuJi7M 동영상 서보모터시운전 www.youtube.com 가장 어려웠던점은 ERROR발생 변수와 현재 위치값의 변수, 현재속도 변수를 찾는 것이 가장 어려웠던것 같다 ERROR변수는 애러 출력이 달린 평션블록에 넣어주면 된다. 다음은 현재위치와 현재 속도 값을 나타내주는 변수를 알아보도록 하겠습니다.
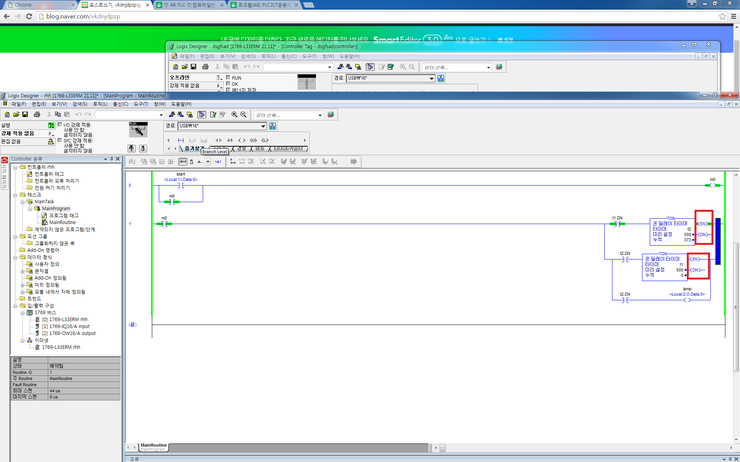
위 사진처럼 현재위치 변수와 현재 속도 변수를 지정 해주면 됩니다. _MC_AX[0].CMD.POS가 현재위치를 나타내는 변수이고 _MC_AX[0].CMD.VEL 현재속도를 나타내는 변수이다.
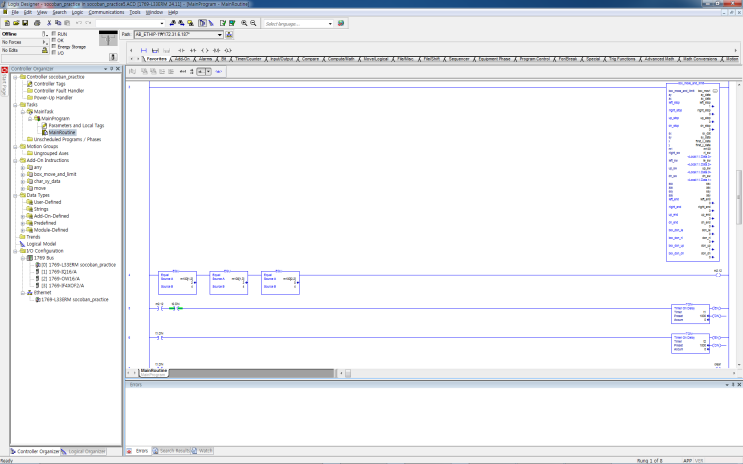
위에보이는 펑션블록이 절대좌표를 기준을 이용하는 평션블록이다.이부분에서 가장어려웠던점은 DIRECTON을 넣어주는 부분이다. 2번쨰 펑션블록에는 반대로 가라는 명령이 쓰여져 있습니다. 절대좌표기준으로 하는 펑션블록과 상대좌표를 사용하는 펑션블록은 다른게 없...

원문 링크 : 서보모터 사용하기