이전 글에서 최소제곱법을 재귀적 프레임으로 확장하여 새로운 관측치에 추정 상태가 어떻게 업데이트되는지 확인하였다. 칼만 필터는 적절한 gain을 선택하여 추정된 상태와 실제 상태 간의 평균 제곱 오차를 최소화하는 방향으로 동작하는 필터이다.
사용하는 기호는 다음과 같다. 칼만 필터는 다음 가정에 기반한다.
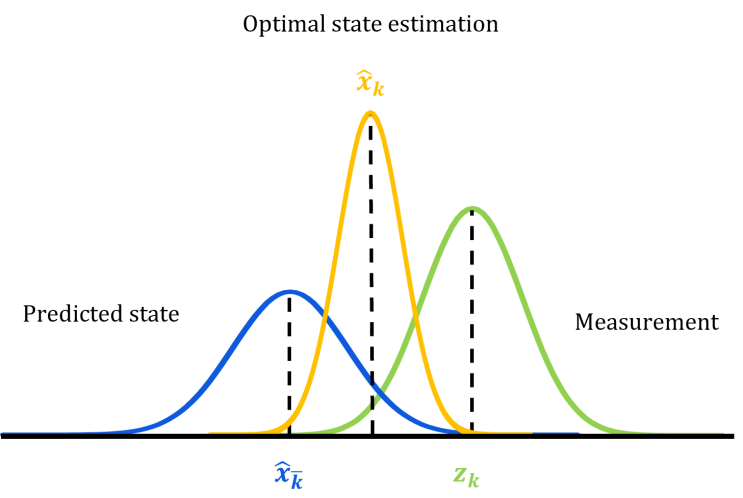
상태와 관측값의 불확실성은 가우시안 분포를 따른다. 예측 오차와 관측 노이즈는 서로 독립적이다.
첫 번째 가정을 통해 추정된 분포의 평균은 상태 벡터에 분산은 상태 오차 공분산을 통해 업데이트한다. 두 번째 가정은 이전 글의 센서의 노이즈는 실제 상태와 추정 상태의 오차와 관련이 없다는 가정하에 오차 공분산을 유도한 것과 관계된다.
칼만 필터란 Fig. 1 Gaussian distributions in Kalman Filter: prediction (blue), measurement (green), and optimal estimate (yellow). 1. 예측 단계 (Predi...
#
KalmanFilter
#
최소제곱법
#
칼만필터
원문 링크 : 칼만 필터 (Kalman Filter) - 3
![[Brief Answers to the Big Questions]](https://mblogthumb-phinf.pstatic.net/MjAyMTAzMjBfMjgw/MDAxNjE2MjMwOTg4OTI5.gVNJDTPho-OlU9buajuVQZKc_uQLQ9Hc6MRNlzC1ZBQg.I_Ufyf16JoauX0evVkolcTwDbyJDlqDATABXnjeuoTgg.JPEG.rlarlarlathgus/IMG_4448.jpg?type=w2)

![[돈으로 살 수 없는 것들]](https://mblogthumb-phinf.pstatic.net/MjAyMTAzMjZfMjIx/MDAxNjE2NzUzMzU3NzEx.Jpgdxby7hQXDHBXaqi2JXRtlxZwE1YMQJm4dSfRo9-sg.dJF-Ucsd1yZOCNkEGGDDI1Ub7i2PGIQ_AWwdrpFdnYIg.JPEG.rlarlarlathgus/IMG_4497.jpg?type=w2)