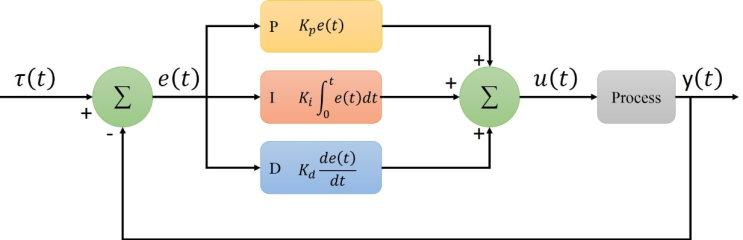
PID 제어는 Proportional-Integral-Derivative (비례-적분-미분) 제어의 줄임말로, 주어진 시스템이 원하는 목표 상태에 도달하도록 조절하는 제어 알고리즘이다. PID 제어는 주로 피드백 제어 시스템에서 사용되며, 예를 들어 로봇 제어, 자동차 제어, 온도 제어 등 다양한 응용 분야에서 활용된다.
제어 알고리즘의 파라미터를 조정함으로써 시스템의 응답 특성을 조절할 수 있으며, PID 제어는 매우 간단하면서도 효과적인 제어 방법 중 하나이다. PID 제어는 현재 상태와 목표 상태 간의 오차를 계산하여 제어 작용을 결정한다.
이 오차에 대해 비례, 적분 및 미분의 세 가지 요소를 조합하여 제어 신호를 생성한다. 비례 (Proportional) : 오차에 비례하는 제어 작용을 생성한다.
오차가 클수록 더 큰 제어 신호가 생성되므로, 시스템의 응답이 빨라집니다. 그러나 오차가 없어지면 제어 작용도 줄어들게 된다.
적분 (Integral) : 시간에 따른 오차의 누적...
#
PID
#
PID제어
#
PI제어
#
비례상수
#
비례적분미분
#
비례적분미분제어기