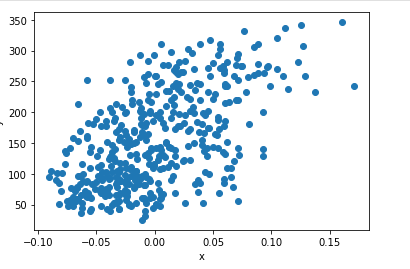
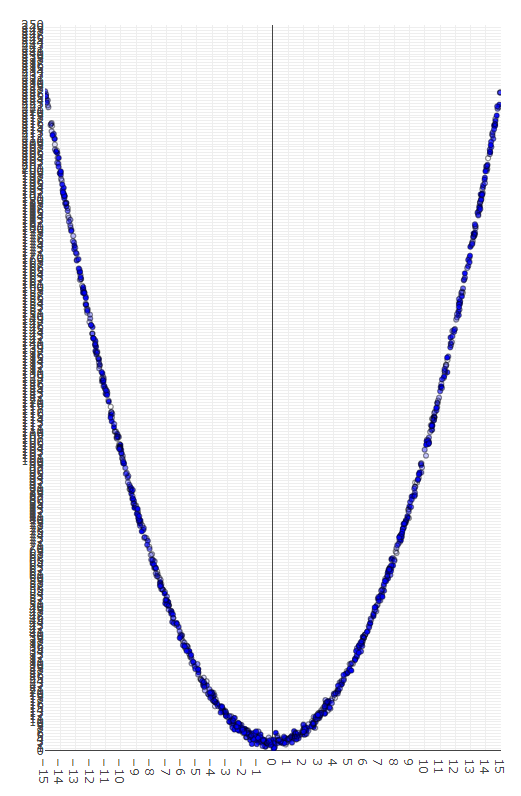
import libraries import numpy as np import torch import torch.nn as nn import torch.optim as optim import torch.nn.init as init from torch.autograd import Variable from visdom import Visdom viz = Visdom() 데이터 생성(data generation) num_data = 1000 num_epoch = 5000 noise = init.normal(torch.FloatTensor(num_data,1),std=1) x = init.uniform(torch.Tensor(num_data,1),-15,15) y = (x**2) + 3 y_noise = y + noise 시각화 input_data = torch.cat([x,y_noise],1) win=viz.scatter( X = input_data, opts=dict( xtickmin=-...
#
pytorch
#
Quadratic